

Ρομποτική Χειρουργική
Συγγραφέας Ηλίας Γκινοσάτης Γράφτηκε στις ,
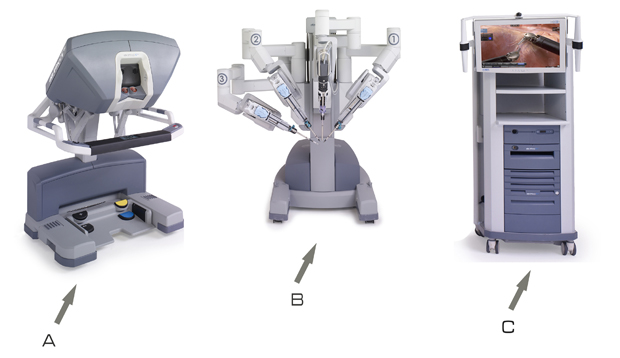
| Στα τέλη της δεκαετίας του 1990 ένα ακόμη εξελικτικό στάδιο στην ελάχιστα επεμβατική χειρουργική επιτεύχθηκε, με την εφαρμογή της ρομποτικής τεχνολογίας. Η Ρομποτική Χειρουργική αναπτύχθηκε αρχικά για να καλύψει την ανάγκη εκτέλεσης χειρουργικών επεμβάσεων σε τοποθεσίες όπου δεν είναι δυνατόν να βρίσκεται εξειδικευμένος χειρουργός. (π.χ. Διαστημικές αποστολές, απομακρυσμένες τοποθεσίες στη γη κ.α.) Κατά την εξέλιξη όμως των αρχικών ρομποτικών συστημάτων έγιναν αντιληπτά τα πλεονεκτήματα και οι ορίζοντες που ανοίγονται με την εφαρμογή της ρομποτικής στην καθημέρα χειρουργική πράξη.Πλεονεκτήματα Εργονομική θέση χειρουργού Τρισδιάστατη 3D εικόνα με υψηλή ευκρίνεια Εργαλεία με δυνατότητα κίνησης σε όλους τους άξονες Δυνατότητα χειρισμού πολλαπλών χειρ. εργαλείων ταυτόχρονα Σύστημα σταθεροποίησης της κίνησης & αποφυγής απότομων κινήσεων Πρόσβαση σε μικροσκοπικά χειρουργικά πεδία με μικρή δυνατότητα κινήσεων Τηλεχειρισμός & δυνατότητα συνεργασίας χειρουργών από διαφορετικές περιοχές Το ρομπότ δεν αντικαθιστά τον χειρουργό καθώς δεν επιλέγει από μόνο του τις κινήσεις που κάνει. Φιλτράρει τις κινήσεις του χειρουργού για μεγαλύτερη σταθερότητα και του παρέχει τη δυνατότητα να χειρίζεται χειρουργικά εργαλεία με απόλυτη ακρίβεια σε όλους τους άξονες 360 μοίρες. Η ελευθερία της κίνησης σε συνδυασμό με την τρισδιάστατη όραση δίνει στον χειρουργό την δυνατότητα να πραγματοποιήσει δύσκολες επεμβάσεις η οποίες δεν θα μπορούσαν να γίνουν εύκολα με τη λαπαροσκοπική χειρουργική. Επίσης το ρομποτικό σύστημα έχει τη δυνατότητα τηλεχειρισμού. Μπορεί ένα μέρος ή και όλη η επέμβαση να πραγματοποιηθεί από ένα χειρουργό ο οποίος βρίσκεται πολύ μακριά. Είναι μια δυνατότητα που συνδυάζεται βέβαια με την ταχύτητα μετάδοσης δεδομένων. Στην παρούσα φάση δεν είναι πλήρως εφικτό λόγω των σχετικά μικρών ταχυτήτων όμως στο άμεσο μέλλον θα μπορούσε να βοηθήσει αρκετούς ασθενείς που βρίσκονται σε μικρότερα ή επαρχιακά νοσοκομεία. Στην κορυφή αυτής της νέας τεχνολογίας βρίσκεται το ρομποτικό σύστημα da Vinci ® Surgical System. Αποτελείται από 3 βασικά τμήματα:
A – Κονσόλα χειρισμού του ρομπότ – θέση χειρουργού B – Ρομποτικοί βραχίονες – θέση ασθενή C – Βοηθητική οθόνη (βοηθός χειρουργός) & μηχανήματα υποστήριξης ρομπότ |
Το ρομποτικό σύστημα da Vinci χρησιμοποιείτε από αρκετές χειρουργικές ειδικότητες.
Γενική χειρουργική – Εντερεκτομή, γαστρεκτομή, χολοκυστεκτομή, χειρ. παχυσαρκίας.
Ουρολογία – προστατεκτομή, νεφρεκτομή, πυελοπλαστική.
Γυναικολογία – υστερεκτομή, εκτομή ινομυωμάτων.
Καρδιο-θωρακοχειρουργική – Bypass, βαλβιδοπάθειες.



